Part-Annotated Object Library#
Part-level annotations—labeled parts and grasp pose candidates—form the foundation of FGManip's fine-grained manipulation. The library is extensible: you can add new objects and parts using the annotation tool, and the resulting grasp data feeds directly into the Skill Library for manipulation policies. This page describes the current scale of the library and how to use the annotation tool.

URDF structure for part-annotated objects.
Library Scale#
| Metric | Count |
|---|---|
| Annotated assets | 431 |
| Annotated parts | 1,078 |
| Grasp pose candidates | 4,312 |
Annotation Tool#
Average annotation time per grasp pose candidate: ~20 seconds.
The figure below shows the annotation tool interface:
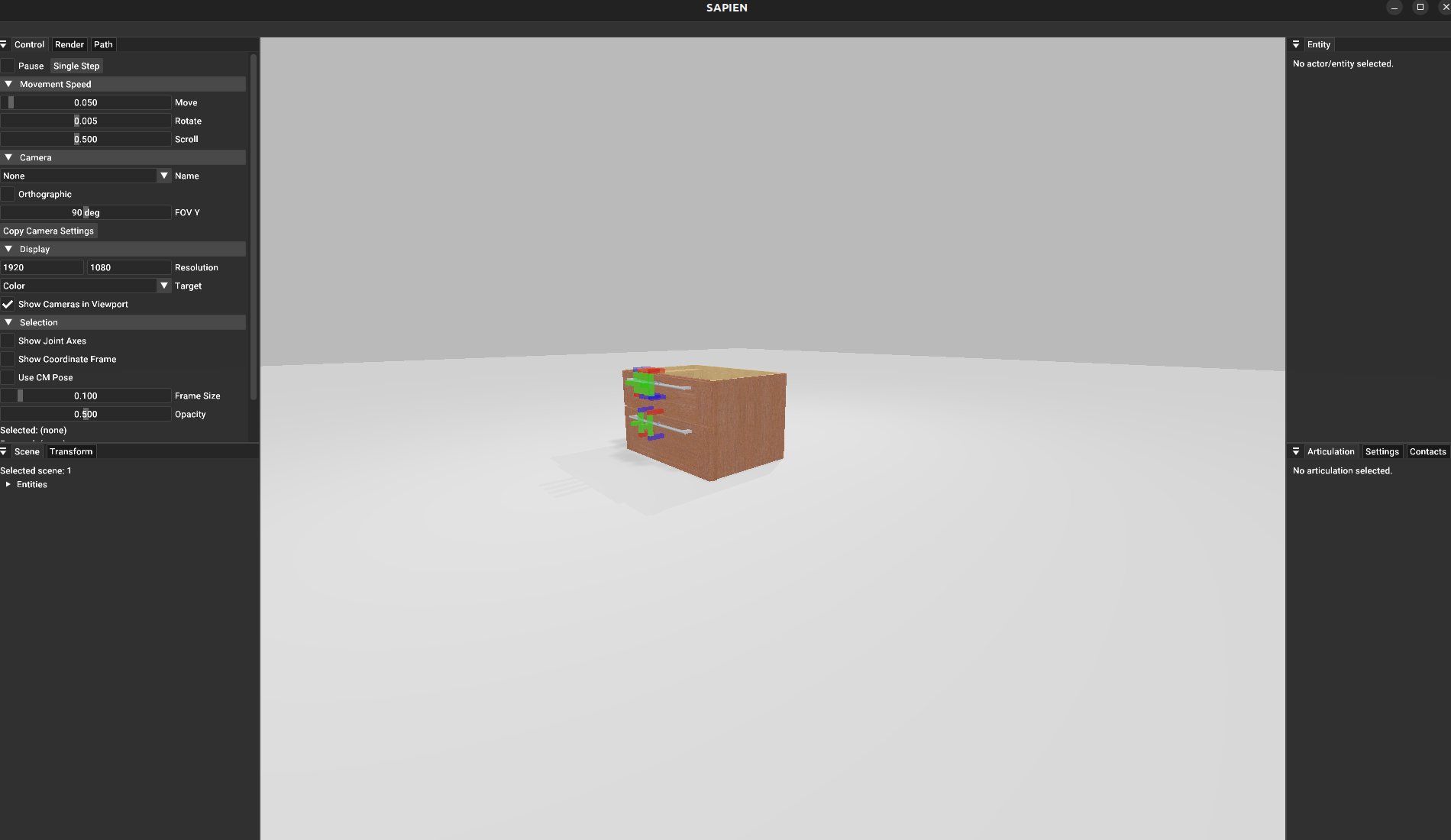
Annotation tool interface for part and grasp pose labeling.
Run the tool to enter the annotation interface. The toolbar provides the following operations:
- save
Save the current annotations.
- create
Create a new grasp pose. A grasp pose is created and can be moved in the viewport to place it, then adjusted to refine the grasp orientation.
- edit
Edit an existing grasp pose. Use keyboard controls to move the selected pose.
- remove
Remove the specified point or grasp pose.
- list
List grasp points under each part.
- resize
Adjust the URDF scale of the object.
After annotation, the tool generates a JSON file in the following format:
{
"object_name": "bottle",
"scale": 0.2,
"grasp_parts": {
"cap": [
{
"id": 0,
"matrix": [[-0.996, 0, 0.087, 0.031], [0, 1, 0, 0], [-0.087, 0, -0.996, 0.843], [0, 0, 0, 1]],
"base": "base",
"description": ""
},
{
"id": 1,
"matrix": [[-0.416, 0.893, 0.174, 0.019], [0.906, 0.423, 0, 0.05], [-0.073, 0.157, -0.985, 0.906], [0, 0, 0, 1]],
"base": "base",
"description": ""
}
],
"body": [
{
"id": 0,
"matrix": [[-0.087, 0, 0.996, -0.037], [0, 1, 0, 0], [-0.996, 0, -0.087, 0.154], [0, 0, 0, 1]],
"base": "base",
"description": ""
},
{
"id": 1,
"matrix": [[-0.087, 0.996, 0, 0.007], [0, 0, 1, -0.05], [0.996, 0.087, 0, 0.248], [0, 0, 0, 1]],
"base": "base",
"description": ""
},
{
"id": 2,
"matrix": [[-0.301, 0.951, -0.072, -0.109], [0.316, 0.171, 0.933, -0.093], [0.900, 0.258, -0.352, 0.278], [0, 0, 0, 1]],
"base": "base",
"description": ""
}
]
}
}